


-
RoboPen - 一个采用通用硬件构建的分布式机器人基础设施,能够长期不间断运行;
-
RoboHive - 一个统一的框架,用于在模拟和真实世界操作中进行机器人学习;
-
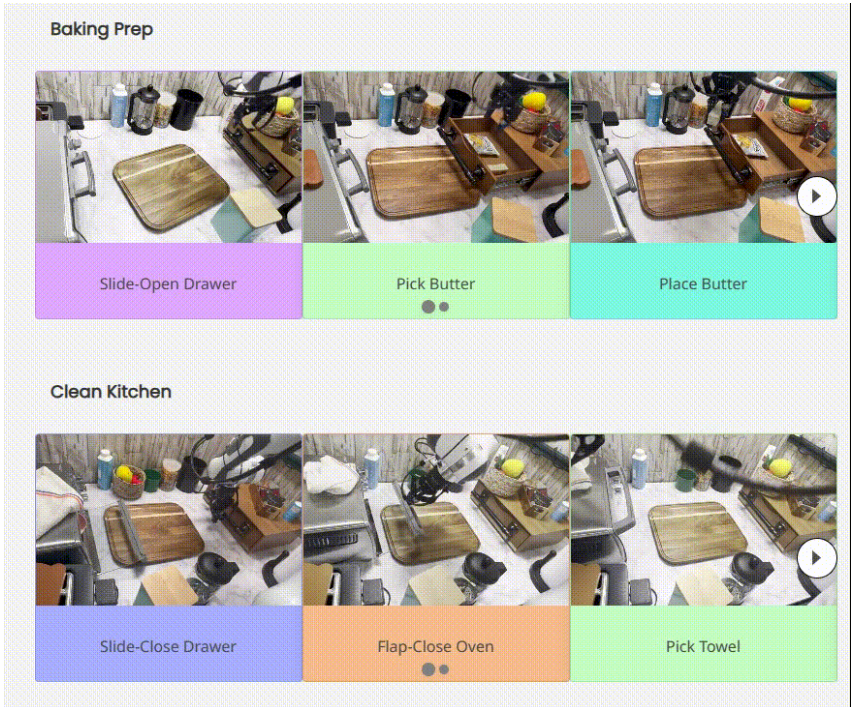
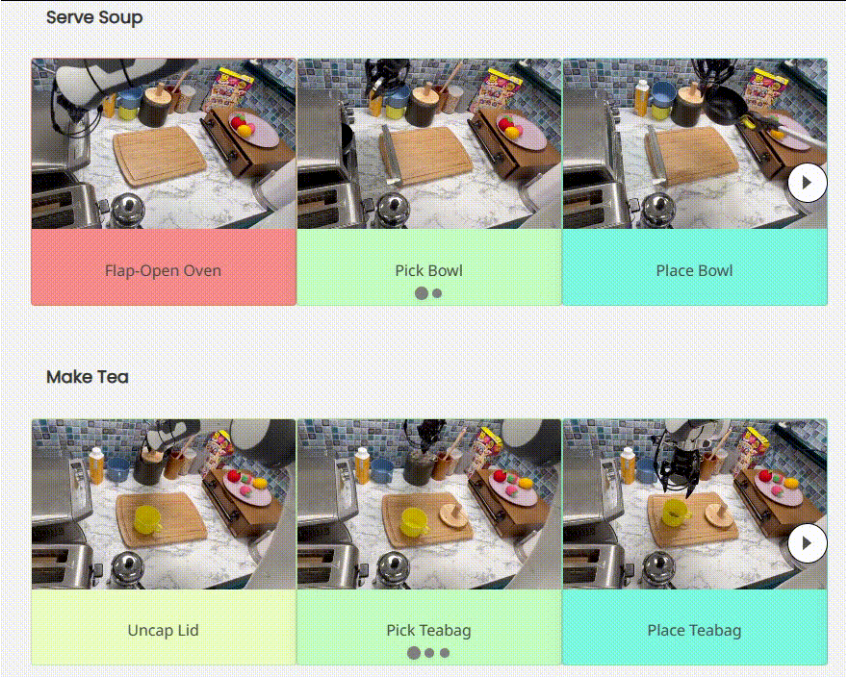
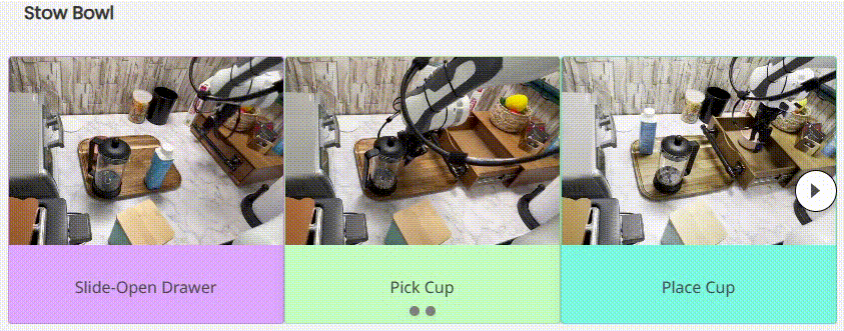
RoboSet - 一个高质量的数据集,代表了各种场景中使用日常物品的多种技能;
-
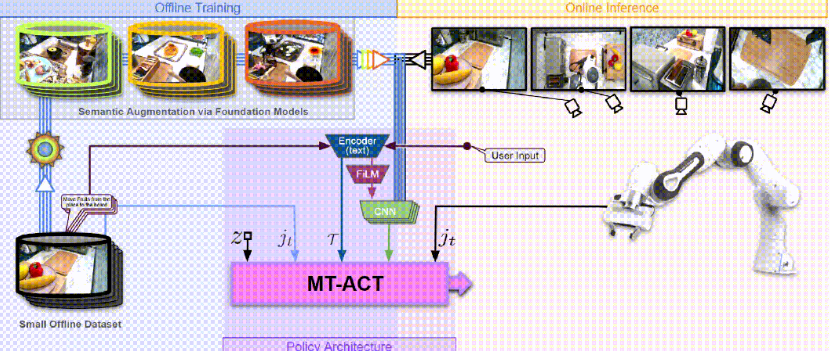
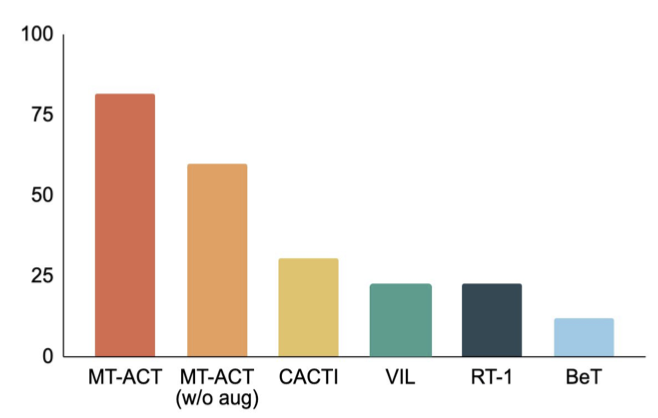
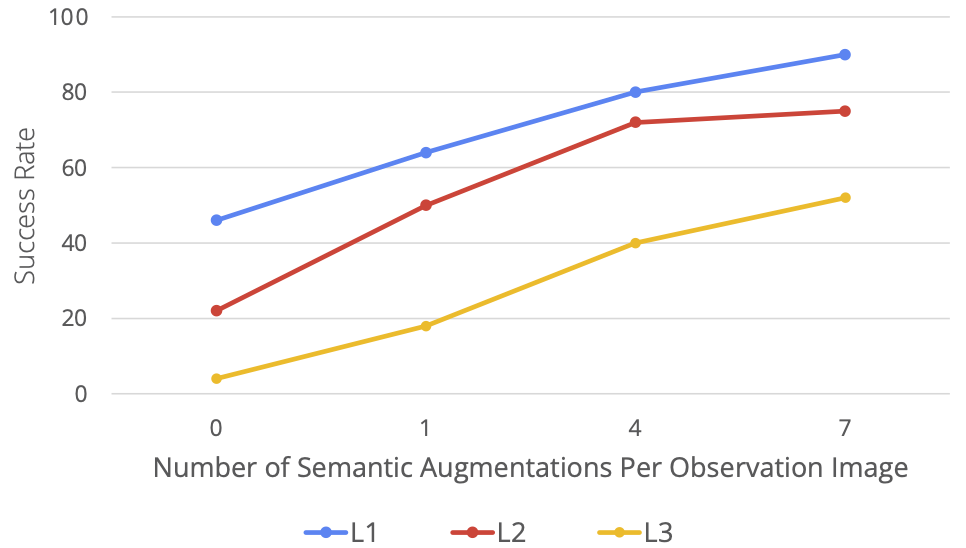
MT-ACT - 一种高效的语言条件多任务离线模仿学习框架,通过在现有机器人经验的基础上创建多样的语义增强集合,从而扩大了离线数据集,并采用了一种新颖的策略架构和高效的动作表示方法,在有限的数据预算下恢复出性能良好的策略。

本文源自「私域神器」,发布者:siyushenqi.com,转载请注明出处:https://www.siyushenqi.com/35713.html
 微信扫一扫
微信扫一扫  支付宝扫一扫
支付宝扫一扫 
















































{kind=link}